
動吸振器や振動発電への応用に向けた自動共振同調機構の研究
研究背景と目的
機械において一度共振が起きてしまうと,機械の故障や破損などを引き起こしてしまいます. そのため,設計の段階で機械に加えられる力(外力)の振動数が分かっている場合, 機械の固有振動数を外力の振動数から遠ざけて,共振を避けるような設計を行う必要があります.
一方で,この避けるべき共振現象を積極的に利用するものがあります.それらの好例として挙げられるのが,「動吸振器」と「振動発電」です.
動吸振器
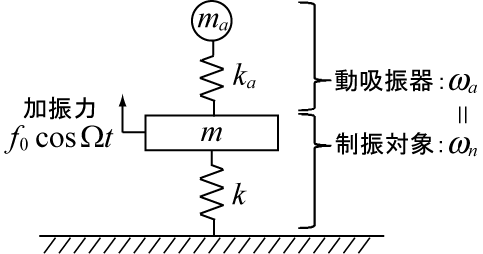
動吸振器は制振装置の1つで,振動を抑えたい対象物に取り付けることで対象の構造を変えることなく振動を抑えることができます. 図1には制振対象に動吸振器を取り付けた様子を表した模式図を示しており,制振対象となる質量 m, ばね定数 k からなる1自由度の主系に,質量 ma, ばね定数 ka からなる従系(動吸振器)が設置されています. このとき,設置する動吸振器の固有振動数 ωa は,主系の固有振動数 ωn と一致するものとします.
この主系に角振動数 Ω を変化させながら,振幅 f0 の周期外力を加えた際の, 主系の振幅の周波数応答を図2に示します.図2から分かるように,外力の振動数 Ω が動吸振器の固有振動数 ωa (= ωn )となる近傍では,主系の振動が抑制されていることがわかります.一方このとき動吸振器は大きく振動しており,動吸振器は外力に共振しています. つまり,動吸振器は主系の代わりに共振することで主系の振動を抑える働きをしています.
 |
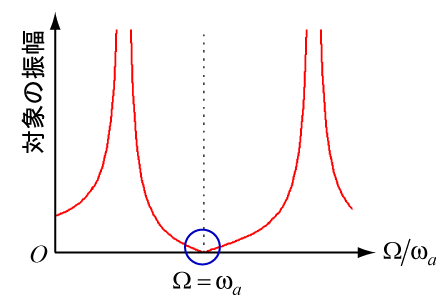 |
図1 減衰のない動吸振器 |
図2 主系の振幅の周波数応答 |
振動発電
振動発電とは,機械や構造物に不可避的に存在する振動を利用して,その振動エネルギーを電気エネルギーへと変換するものを指します. 最も単純な構造の1つである電磁誘導式のものでは,図3のように機械や環境中の振動を利用して発電部(磁石やコイル)を振動させることで発電を行います.
振動発電において,より効率良く大きな発電量を得るためには,発電素子(磁石やコイル,圧電素子など)を如何に大きく振動させるかが重要になります. したがって,高効率な振動発電装置を実現するためには発電素子が環境振動に共振することが必要であり,共振現象を積極的に利用する装置となります.
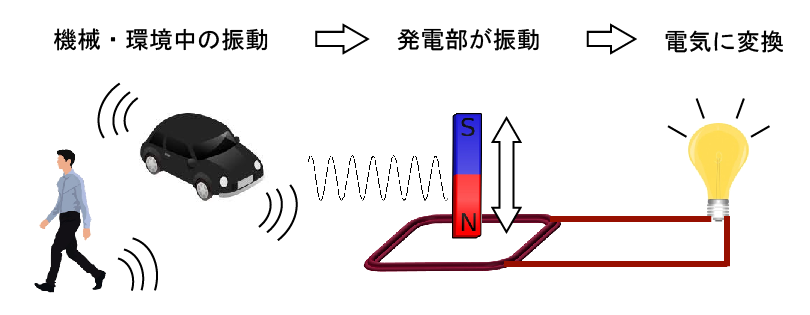
図3 振動発電のイメージ
このように,共振を上手に利用することで様々な利点を得ることができますが,これらの装置にはある問題点があります. それは,「外力の振動数が変化すると性能が著しく低下する」というものです. 動吸振器を例にとってみると,外力の振動数 Ω が変動し動吸振器の固有振動数 ωaから大きく離れると, 図2に示すように主系の振幅が急激に増加し,制振性能が大きく劣化してしまうことがわかります.
このような性能の劣化を防ぐためには,動吸振器や振動発電装置の固有振動数を変動する外力の振動数に追従させる必要があります. この振動数の追従において最も利用されるものが,コンピュータによる能動制御を利用した手法です. アクティブ型とも呼ばれるこの手法は,コンピュータによって外力の振動を観測し,その情報を元に装置のパラメータを能動的に変化させることで, 固有振動数を外力の振動数に追従させます.コンピュータによる能動制御は確実である反面,電子制御系を用いることによるコスト面の問題や, パラメータを変化させるためには外部からのエネルギーの注入が不可欠であるため外部電源等を必要とするといった使用条件の制約が生まれます.
そこで,本研究では制御系を必要とせず自らの固有振動数を変化させて,外力の振動数を自動で追従し共振する「自動同調共振機構」の開発を目的としています. そして,この「自動同調共振機構」を持つ装置として図4に示すような受動要素のみで構成された装置を考案しました.
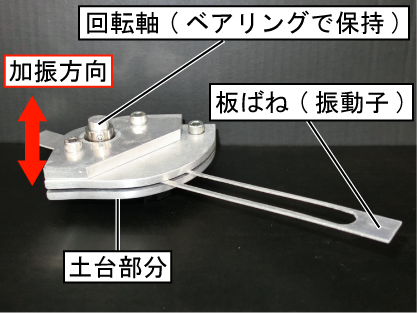
図4 自動同調共振機構を持つ実験装置
固有振動数が変化する仕組み
まず図4に示す実験装置は,振動子となる板ばね,上下2枚の土台部分,回転軸およびそれを保持するベアリングから構成されています. 板ばねの一端は回転軸に支持され,板ばね-土台間には隙間を設けていることから,板ばねは回転軸まわりに滑らかに回転することが出来ます. また図5に示すように,土台部分の形状を上から見ると回転軸からの半径が徐々に変化するような扇形となっているため, 土台から突出した部分の板ばねの長さが板ばねの位置によって変化する構造となっています. これにより,実験装置は板ばねが水平面内を回転軸まわりに回転移動することで,自身の固有振動数が変化する機構を有しています.
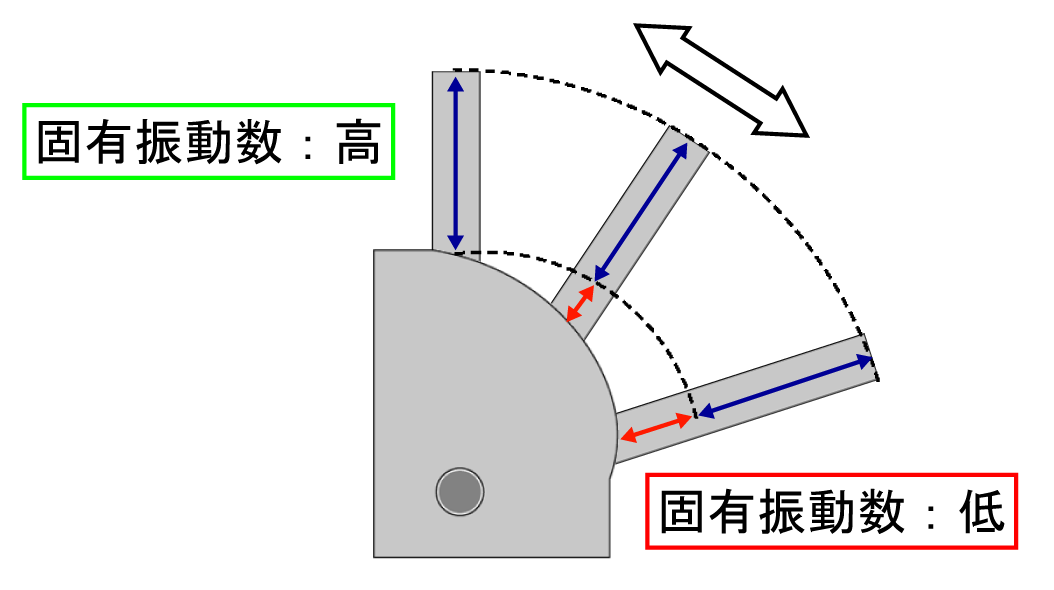
図5 固有振動数の変化機構
実験装置が自動同調共振機構を実現する上で,最も大切な特徴が「板ばねの追従現象」です. 板ばねの追従現象とは,実験装置を加振器に取り付け,図4に示すように回転軸と同じ方向に加振すると,板ばねが鉛直方向の加振のエネルギーを 水平方向の駆動力へと変換し,自動で加振振動数を追従し共振状態に達する本実験装置特有の現象のことを指します. この追従現象により実験装置は制御系を必要とせず,外力の振動数を自動で追従し共振することが可能になっています.
今後の取り組み
これまで実験においては,図4に示す実験装置が加振振動数の変化に対応できることを実験的に検証しました. 今後は,高速度カメラを用いた板ばね挙動の詳細な観測に加え,装置をモデル化し数値シミュレーションを実施することで, 板ばねの追従現象のメカニズムを解明するとともに,自動同調共振機構の最適設計法の確立を行っていきます.
